-
×
 پمپ دنده ای ایران تولید SHF5
1 × 300.000.000 ریال
پمپ دنده ای ایران تولید SHF5
1 × 300.000.000 ریال
جمع جزء: 300.000.000 ریال
پمپ دنده ای ایران تولید SHF5
1 × 300.000.000 ریال جمع جزء: 300.000.000 ریال

تعداد دور موتور در دقیقه را گویند، عموماَ با ” N ” نمایش داده می شود و با ” RPM ” اندازه گیری می شود.
در بعضی از فرمول ها براساس دور بر ثانیه سنجیده می شود که با ” n ” نشان داده می شود.
در دروس آکادمیک از واحد دیگری که رادیان نامیده می شود استفاده می گردد که با ” ω ” نشان داده می شود. دلیل استفاده از آن در فرمول ها بخاطر ساده کردن نگارش آنها می باشد.
ضریب تبدیل: n=N/60 ω=۲πN/60
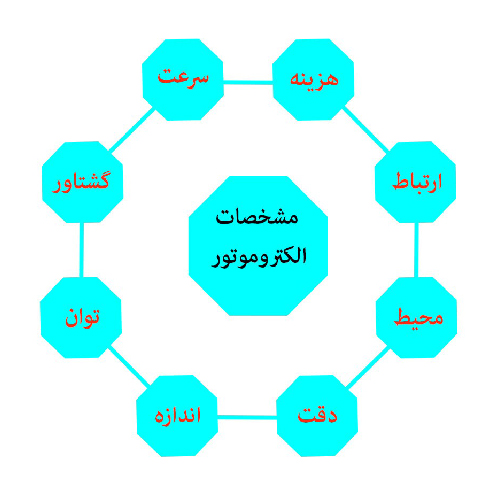
هدف یک موتور دوار فراهم کردن سرعت خروجی چرخشی مطلوب در حالی است که بر بارهای چرخشی مختلف که در برابر خروجی چرخشی (گشتاور) مقاومت می کنند غلبه می کند. سرعت و گشتاور به طور مستقیم با هم مرتبط هستند و دو عامل اصلی عملکرد در انتخاب صحیح موتور برای یک کاربرد یا استفاده خاص هستند. برای یادگیری نحوه انتخاب موتور مناسب متناسب با کاربرد خود، اولین قدم درک رابطه بین سرعت، گشتاور و توان خروجی موتور است.
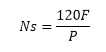
سرعت سنکرون یا تعداد دوردردقیقه بر حسب فرکانس و تعداد قطب های موتور از رابطه ی زیر به دست می آید که در این رابطه F فرکانس و P تعداد قطب ” پل” موتور است .
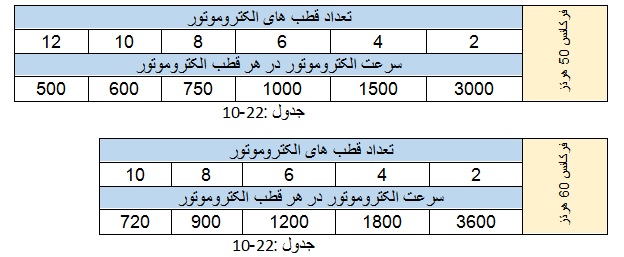
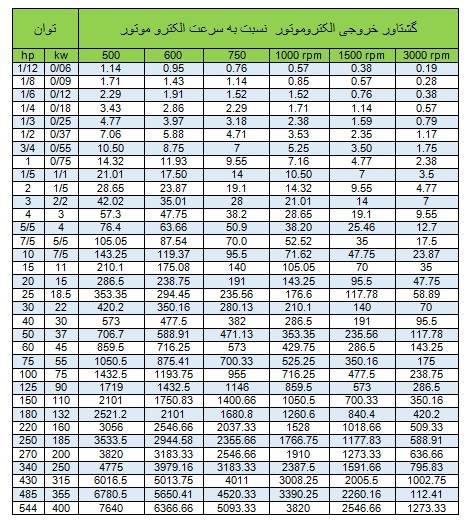
در جدول های زیر 22-10 مقدار سرعت سنکرون بر حسب تعداد قطب برای فرکانس های 50 و 60 هرتز Hz ارائه شده اند
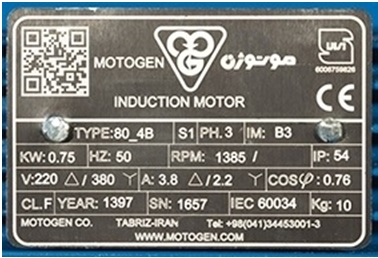
در بعضی از الکتروموتور ها در روی پلاک جلوی قسمت (TYPE) عدد اول فرم الکتروموتور رو نشون میده و عدد دوم تعداد قطب یا ” پل” رو نشان می دهد.
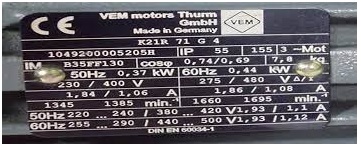
در الکتروموتورهای اروپایی روی پلاک را به دو قسمت تقسیم کرده اند که 50 Hz و60 Hz که اطلاعات در هر قسمت متفاوت است.
کاربرد الکتروموتور 3000 دور – 2 pol
– ماشین ابزار
– اره برقی صنعتی
– هواکش ها
-پمپ سانتیفیوژ
– کمپرسورها
– ویبره بدنه
– هیدروپمپ ها
…
کاربرد الکتروموتور 1500 دور – 4 pol
-کانوایر ها
-گیربکس های صنعتی
-پمپ کارواش
-دستگاه های صنعتی
-کشنده ها
-خردکن ها
-فیدر ها
-سرند ها
-سنگ شکن
…
کاربرد الکتروموتور 1000 دور – 2 pol
-پمپ دند ه ای
-ویبره
-آسیاب ها
-خم کن
-جرثقیل
-وینچ
-بالابر کشویی
-حمل کنند ه ها
….
کاربرد الکتروموتور 750 دور – 8 pol
-صنایع سیمان
-صنایع مواد غذایی
-پتروشیمی
-کاشی و سرامیک
-نساجی
-معدنی
-چوب و کاغذ
…
کاربرد الکتروموتور 600 دور – 10 pol
-صنایع کشتی سازی
-صنایع خودرو سازی
-صنایع چرم
-غلیظ کش ها
-پمپ های اسید
-صنایع سلولوزی
-میکسچر داروسازی
…
کاربرد الکتروموتور 500 دور – 12 pol
-خم کاری
-فرومینگ و فرم دهی
-تیفور کششی
-زه کش ها
-صنایع آب و فاضلاب
-میکسچر های کپسولی
-کاشی و سرامیک
…
قدرت حرکتی تولید شده از یک موتور الکتریکی را گشتاور می گویند.
در موتور های الکتریکی : فرمول گشتاور تولید شده الکتروموتور (T=F*r ( N.m) ) می باشد.
گشتاور=T
نیروی محوری = F
شعاع = r

اگر به موتور الکتریکی نیاز داریم که گشتاور قوی تری داشته باشد ، معمولا موتور الکتریکی با قدرت زیاد را انتخاب می کنیم . علاوه براین سرعت چرخش موتور الکتریکی نیز بر اندازه گشتاور تاثیر می گذارد .
رابطه بین قدرت و گشتاور موتور الکتریکی
– قدرت موتور بالاتر . سپس گشتاور بالاتر
– قدرت موتور کمتر . سپس گستاور کمتر
رابطه بین سرعت و گشتاور موتور الکتریکی
– سرعت موتور بیشتر .سپس گشتاور کمتر
– سرعت موتور کمتر . سپس گشتاور بیشتر
برای انتخاب صحیح یک الکتروموتور نیاز به انجام یک سری محاسبات است . مثلا شما باید بدانید به موتور الکتریکی با چه توانی نیاز دارید .
منظور از توان چیست?
انرژی انواع مختلفی دارد. مثلا در یک لامپ ورودی انرژی الکتریکی و خروجی انرژی روشنایی است. ما به وسیله ابزارهای مختلف، انرژی را از یک حالت به حالت دیگر تبدیل میکنیم. مثلا موتور الکتریکی انرژی الکتریکی را به انرژی مکانیکی تبدیل می کند. در یک خودرو، انرژی سوخت را به انرژی مکانیکی تبدیل میکند. در ژنراتور انرژی مکانیکی به انرژی الکتریکی تبدیل میکند. پس در هر وسیله یک انرژی ورودی و یک انرژی خروجی وجود دارد.
واحد انرژی توان است. در یک وسیله برای انجام محاسبه اینکه چقدر ورودی داده ایم و چقدر خروجی گرفته ایم، با واحد توان صحبت میکنیم. مثلا در یک لامپ رشته ای 400 وات انرژی الکتریکی میدهیم و 20 وات انرژی روشنایی تحویل میگیریم. همیشه به علت وجود یکسری تلفات، انرژی خروجی کمتر از انرژی ورودی است. به درصد اختلاف انرژی ورودی و خروجی، راندمان دستگاه گفته میشود. رتبه بندی مصرف انرژی دستگاه ها نیز بر اساس راندمان آن ها است.
ورودی الکتروموتور انرژی الکتریکی است و خروجی آن انرژی مکانیکی و آنچه که برای ما اهمیت دارد خروجی موتور الکتریکی است، در نتیجه باید توان انرژی مکانیکی را محاسبه کنیم.
قدرت × سرعت = توان انرژی مکانیکی
اما باید به این نکته توجه داشت که نوع انرژی مکانیکی در محاسبات اثر گذار است. انرژی مکانیکی به دو نوع انرژی مکانیکی خطی و انرژی مکانیکی دورانی تقسیم میشود.
(نیوتون)قدرت خطی × (متر بر ثانیه)سرعت خطی = (وات)توان انرژی مکانیکی خطی
(نیوتون متر)قدرت دورانی × (رادیان بر ثانیه)سرعت دورانی = (وات)توان انرژی مکانیکی دورانی
نکته: در صنعت برای توان های پایین معمولا بجای استفاده از واحدهای رادیان بر ثانیه و نیوتون متر از واحدهای دور بر دقیقه و کیلوگرم سانتی متر استفاده میشود که برای تبدیل این واحدها به واحدهای بکار رفته در فرمول محاسبه توان، کافی است آن ها را در عدد 10 ضرب کنیم.
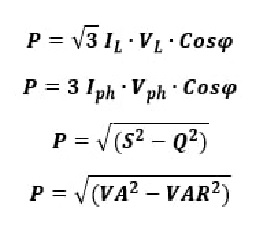
برای بدست آوردن توان یک الکتروموتور سه فاز از یک سری کمیت ها استفاده می کنیم که به شرح زیر است:
VLبرای ولتاژ خط
ILبرای جریان خط
Vphولتاژ فاز
Iphجریان فاز
COSφ ضریب قدرت
توان اکتیو (P): توان حقیقی و توانی که باعث چرخش شفت موتور می شود و واحد آن وات (W) می باشد
مشخصات ابعادی الکتروموتورهای سه فاز صنعتی و تک فاز
– الکتروموتور سه فاز پوسته آلومینیومی







